1.自律走行車とは何か?
自律走行車(AV)は、道路上の危険を回避し、交通状況に対応しながら、出発地から目的地まで車両をナビゲートする際に、人間のドライバーの一部または全部を代替する技術を使用する。自動車技術会(SAE)は、人間の介入の度合いに応じて6段階に分類するシステムを開発し、広く採用されている。米国高速道路交通安全局(NHTSA)はこの分類システムを採用している。
AVの研究は、1980年代に大学が車道インフラを必要とするタイプとそうでないタイプの2種類のAVの研究を始めたことから始まった。米国国防高等研究計画局(DARPA)は、150マイルのオフロードコースでAVの性能をテストする「グランドチャレンジ」を開催してきた。2004年のグランドチャレンジでは完走した車両はなかったが、2005年には5台が完走。2007年の第3回DARPAチャレンジでは6チームが完走し、通常の交通法規に従って都市環境をナビゲートする60マイルのコースを走破した。2015年、ミシガン大学は自律走行車のために建設された初のテスト施設「Mcity」を建設した。そこでは、AVの安全性、効率性、アクセシビリティ、商業的可能性に関する研究が行われている。無人航空機システム(UAS)、つまりドローンは、ラストワンマイルの荷物配達、医療品輸送、重要インフラの検査などの商業事業に導入されている。
AVは、道路、他の車両、道路上および道路沿いの物体を感知するために、テクノロジーとセンサーを組み合わせて使用する。
2.SAE AV分類システムは、自動化のレベル別に分類されている:
レベル0(運転自動化なし)
現在道路を走っているほとんどの車は、レベル0:手動制御である。ドライバーを支援するシステムがある場合もあるが、人間が「動的運転タスク」を提供する。例えば、緊急ブレーキシステムは、技術的に車両を「運転」しないため、自動運転には該当しない。
レベル2(部分的運転自動化)
これは先進運転支援システム(ADAS)を意味する。車両はステアリングも加減速もコントロールできる。人間が運転席に座り、いつでも車をコントロールできるため、自動運転には及ばない。テスラ・オートパイロットとキャデラック(ゼネラルモーターズ)のスーパークルーズ・システムは、いずれもレベル2に該当する。
レベル3(条件付運転自動化)
レベル2からレベル3へのジャンプは、技術的観点からは相当なものだが、人間の観点からは無視できないにしても微妙なものである。レベル3の車両には「環境検知」機能があり、低速走行中の車両を加速して追い越すなど、情報に基づいた判断を自分で下すことができる。しかし、それでも人間のオーバーライドが必要だ。システムがタスクを実行できない場合、ドライバーは常に注意を怠らず、コントロールできるようにしておかなければならない。
レベル4(高度運転自動化)
レベル3とレベル4の自動化の重要な違いは、レベル4の自動車は、物事がうまくいかなかったり、システム障害が発生した場合に介入できることである。この意味で、これらの車はほとんどの状況で人間の介入を必要としない。ただし、人間が手動でオーバーライドするオプションは残っている。
レベル5(完全運転自動化)
レベル5のクルマは人間の注意を必要としない。つまり、「ダイナミックな運転タスク」は排除される。レベル5のクルマは、ハンドルやアクセル/ブレーキペダルすら持たない。ジオフェンシングから解放され、どこにでも行くことができ、経験豊富な人間のドライバーができることなら何でもできるようになる。完全自律走行車は世界のいくつかの地域でテストが行われているが、まだ一般に利用できるものはない。
3.市場の現状と予測
研究者たちは、2025年までに約800万台の自律走行車または半自律走行車が道路を走るようになると予測している。道路に合流する前に、自動運転車はまず6段階の運転支援技術の進歩を経なければならない。
マーケットリーダー
- ウェイモは、公道で2,000万マイル以上、シミュレーションで数百億マイルを走行し、車両をテストしてきた。
- テスラは2014年以来、オートパイロットモードで30億マイル以上を走行している。
- その他、アウディ、BMW、ダイムラー、GM、日産、ボルボ、ボッシュ、コンチネンタル、モービルアイ、ヴァレオ、ヴェロダイン、Nvidia、フォード、その他多くのOEMやテクノロジー企業が主要な貢献者である。
規制、責任、予想されるスケジュール
- 規制はAVの導入に直接影響する。AVには国家的な基準やガイドラインがないため、各州が独自に決定することができる。2018年、議会はAVの試験、規制、配備の枠組みを実施するAVスタート法の成立に取り組んだ。この法案は両院を通過することができなかった。2020年2月現在、29の州とワシントンD.C.がAVの定義、使用方法、責任などに関する法律を制定している。
- 2016年5月のテスラ・モデルSによる死亡事故で浮き彫りになったように、AV事故が発生した場合、製造物責任法は責任を適切に割り当てる必要がある。責任の所在は複数の要因、特に車両がその自動化レベルに応じて適切に操作されていたかどうかに左右される。
- 多くの研究者、OEM、業界の専門家は、AV市場の普及と本格的な普及の時期について異なる予測をしているが、大半は2030年頃にレベル5のAVが登場すると予測している。
指標と関連する影響
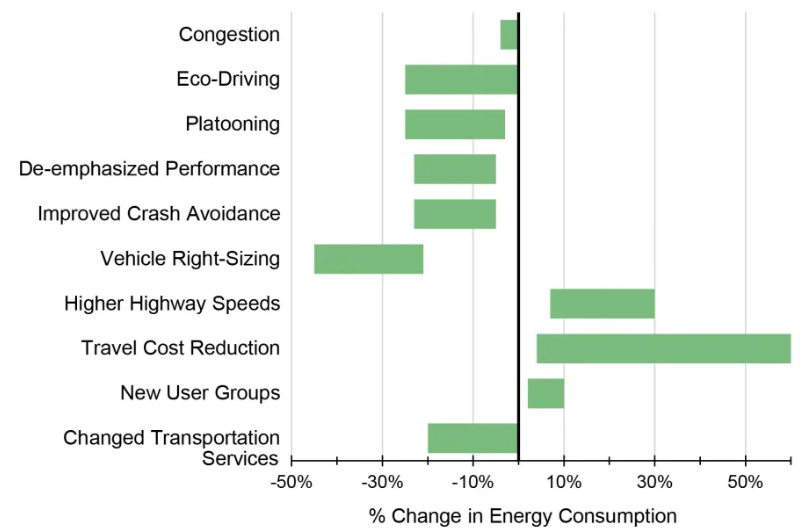
- 渋滞:渋滞は減少し、燃料消費は0~4%減少すると予測される。しかし、渋滞が減少すると、車両走行距離(VMT)が増加する可能性が高く、燃料消費量の削減効果は限定的である。
- エコドライブエコ・ドライブは、燃料消費を削減する一連の慣行で、エネルギー消費を最大20%削減できると予測されている。しかし、AVアルゴリズムが効率を優先しなければ、燃費はかえって低下する可能性がある。
- プラトーニング:プラトゥーニング(集団で密接に走行する分離した車両の列車)は、車両の数、分離、車両の特性によって異なるが、エネルギー消費を3~25%削減できると期待されている。
- 重視されない性能:快適性と生産性が優先されるようになると、急加速などの車両性能は重視されなくなり、燃料消費量を5~23%削減できる可能性がある。
- 衝突回避性能の向上:AVの安全機能が向上しているため、衝突事故が起こりにくくなり、車両の重量とサイズの削減が可能になり、燃料消費量が5~23%減少する。
- 車両の適正化:車両のユーティリティを特定のニーズに合わせる能力。ライドシェア型のオンデマンド・モデルと組み合わせた場合にのみ、その恩恵を十分に享受できる可能性がある。
- 高速道路の高速化:高速道路での速度上昇は、安全性の向上によるものと思われ、燃費を7~30%向上させる。
- 移動コストの削減: AVは、生産性と運転の快適性の向上による保険料と時間コストの削減により、移動コストを削減すると予測される。これらのメリットは、エネルギー消費を4%から60%増加させる可能性がある。
- 新しいユーザーグループ:AVは、特に高齢者や身体障害者のVMTを増加させ、新規利用者の燃料消費を2-10%増加させる可能性がある。
- モビリティ・サービスの変化:ライドシェア型のオンデマンド・ビジネスモデルは、人件費の大幅削減によりAVを活用する可能性が高い。ライドシェアモデルの採用は、エネルギー消費を0~20%削減すると推定される。
- 現在のところ、こうした相互に関連する影響を正確に評価することはできないが、ある研究では4つのシナリオの潜在的影響を評価し、それぞれの可能性は未知数だった。最も楽観的なシナリオでは道路輸送エネルギー総量が40%減少し、最も悲観的なシナリオでは道路輸送エネルギー総量が105%増加すると予測された。